|
|
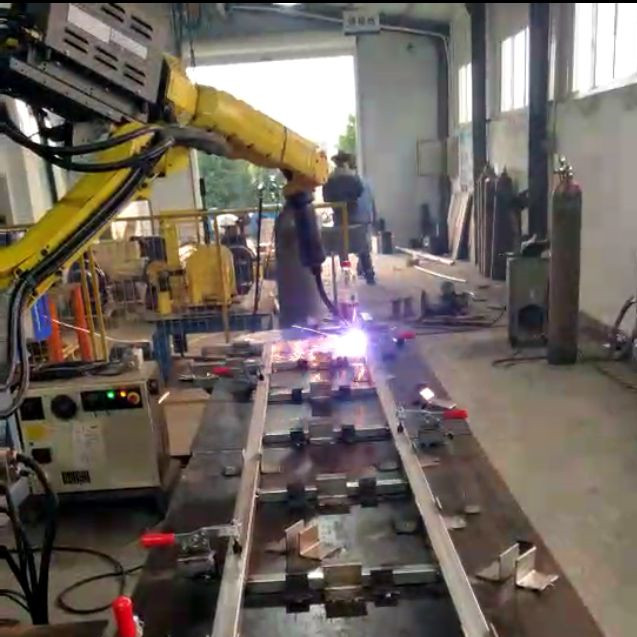
机器人焊接护栏
 发联系信
发联系信- 产品详情
海宝公司导航页:ABB机器人发那科机器人 OTC机器人安川机器人

焊接焊接机器人技术性能特点
1、主体结构日趋紧凑化,大多采用惯性小、相对作用范围大的多关节型。
首先分析自由度数问题,目前的弧焊焊接机器人至少5个自由度才能较好地完成一般工件焊接加工,而考虑到加工对象可能要求完成一条闭合空间曲线或多道空间曲线焊缝的焊接,没有6个自由度是很难保证焊枪始终有合适的姿势来满足焊接工艺要求的,而且重要关节作用范围越大,对于通过姿态控制来达到工艺要求就越有利。
其次分析一下最大负荷能力问题,负荷小可使上臂和手腕容易做得小巧灵活,但机械手必须握托焊枪,支撑用于自动定位,焊缝跟踪,焊接质量检测等传感器,要求增大负荷能力是必然的。
2、控制系统功能与电焊机及焊接工艺相匹配
焊接机器人控制的研究已成为自动控制理论界的热门课题,除了研究高速,高精度轨迹控制外。各种基于传感器信息的依从控制也是大家所关注的,因为焊接机器人动力学模型非常复杂,所以目前的焊接机器人控制器多数还是基于运动学模型的控制器。
焊接机器人计算机控制系统基本可以分为两大类;一类是利用现成的小型机或微型机,其操作系统具有通用性,但中断功能和实时控制性能差,成本较高、体积较大。严格地说,这种控制系统的焊接机器人主要适合演示,试验制技术有较大发展,例如需要有根据视觉、听觉、力觉等各种传感器对外部环境的认识进行理解室研究;第二类是根据焊接机器人的动作和生产工艺要求而专门设计的微型机、结构紧凑、实时监控、中断功能强,可靠性高、成本较低,目前国外工业焊接机器人控制系统多属此类、硬软件技术交叉发展,有些硬件功能由软件去实现,而大量的控制软件被固化。这种专用LSI的研究把多CPU并行处理结构制作在一个芯片上,形成一种焊接机器人控制系统特殊结构形式是焊接焊接机器人控制技术发展的一个重要动向。
焊接机器人已经开始从特定环境下的固定工作方式走向移动工作方式,进而开始从特定构造环境走向自然环境,这就要求传感技术和控、推理、判断并自行决定其行动的功能的自动控制系统,也就是说自适应控制技术与智能技术正在迅速发展是焊接焊接机器人控制技术又一个重要发展动向。
当然,我们在设计焊接机器人控制系统时既要考虑到国际上的重要发展动向又要考虑国内的实际条件,焊接焊接机器人控制系统是配合电焊机及其辅助设备为完成特定或通用焊接工艺服务的,这就要求焊接机器人硬软件设计者与焊机及焊接工艺的研制者相互合作或集二者于一身。
3、电伺服是目前公认的较好驱动方式
电伺服驱动的焊接机器人控制系统能耗小、可靠性较高,位置控制较容易实现。伺服控制系统包括电流反馈、速度反馈及位置反馈等三闭环系统。利用软件进行加、减速度控制,所以无论焊枪处于任何速度时其起动和停止都十分迅速和平稳,这一特性对满足焊接工艺要求,保证焊接质量是至关重要的。
4、提供用户语言,使用方便
焊接焊接机器人像其它计算机系统一样应该或已经配备用户语言,用户只要采用其功能相应的缩写符号进行操作和编程,简单的的几段程序或按一次功能键就可实现某些焊接作业或完成某些程序修改、很容易记忆和掌握,无须用户去掌握焊接焊接机器人本身的深奥知识。
以上就是焊接机器人技术性能特点。