

五轴四联动坡口相贯线网架切割机
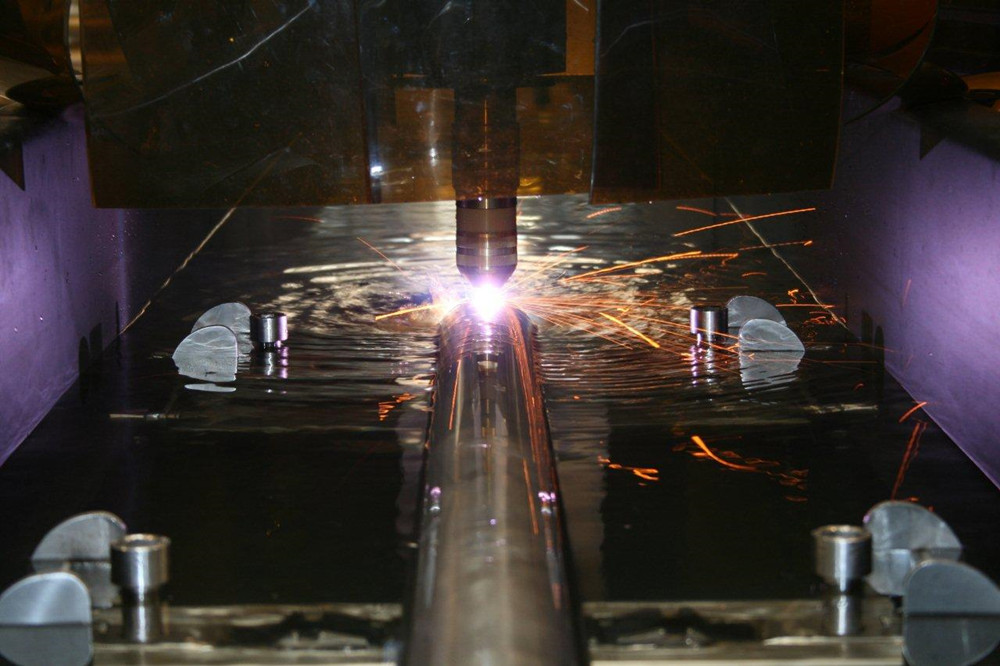
相贯线切割机切割不锈钢管:

1.设备用途说明:
1.1主要用于各种管道系统的相贯线和端部的热切割。
1.2适用工件材料:低碳钢 (铜镍管 不锈钢管需用等离子切割)
2.机床使用环境:
温度:-5-40 ℃; 湿度≤90%;电源:220V±10% 50Hz;
3.技术规格:
| 编号 | 项目 | 参数 |
| 1 | 切割管径 | Φ=60~1000mm |
| 2 | 火焰切割管壁厚度 | δ1=6~50mm |
| 3 | 等离子切割管壁厚度 | 由等离子电源功率来决定 |
| 4 | 有效切割工件长度 | L1=1200Omm |
| 5 | 切割速度 | V≤ 2000mm/min |
| 6 | 移动速度 | V0=10~6000 mm/min |
| 7 | 割炬轴向摆动角度 | A=±45° |
| 8 | 割炬径向摆动角度 | B=±45° |
| 9 |
4.运动轴数:
| 运动轴 | 切割机轴数选择 | 5+1轴 |
| X轴: | 管件旋转轴 | 联动 |
| Y轴: | 割炬沿管件轴向水平移动轴 | |
| A轴: | 割炬沿管件轴向摆动轴 | |
| B轴: | 割炬沿管件径向平面摆动轴 | |
| Z轴: | 割炬垂直升降轴 | |
| W轴: | 割炬小车径向水平移动轴 |
注:前5轴切割时实现联动,W轴按键操作
5.切割机钢管传动形式及切割方式:
5.1切割机钢管传动形式:卡盘式结构。
5.2切割方式:火焰切割(或)或精细等离子切割。
6. 设备主要部件配置
| 部件名称 | 数量 |
| 控制系统 | 1套 |
| 卡盘支座 | 1个 |
| 可调节钢管支架 | 2套 |
| 机头组件 | 1套 |
| 机头上支座 | 1套 |
| 机头下支座 | 1套 |
| 导轨 | 9节(每节3m) |
7.设备的主要切割性能:
 7.1 主要数控精细等离子切割机形式
7.1 主要数控精细等离子切割机形式
骑座式:支管内壁和母管外壁相贯
插入式:支管外壁和母管内壁相贯
7.2可切割的母管相贯线孔或支管相贯线端面为:
| 图形 | 相贯线 | 图形 | 相贯线 |
| 母管与支管斜交相贯 | 母管开正交、偏心矩形孔 | ||
| 母管与支管正交相贯 | 母管开360°坡口孔 | ||
| 母管与支管偏心相贯 | 支管与环外壁相贯 | ||
| 母管开正交、偏心槽 | 支管与球相贯 | ||
| 多重支管的相贯 | 圆管与平面正交、斜交 | ||
7.3切割最小交叉角度20°。
 7.4提供三种坡口的处理功能:
7.4提供三种坡口的处理功能:
定角坡口:按用户输入的角度进行坡口切割(最 大坡口角度45°)
变角坡口:根据相贯的两面角而变化的坡口
定高坡口:剖口高度满足客户设定值
7.5连续切割:机器具有多条相贯线连续切割的功能,只要将管件上需切割的数据一次输入机器,机器可自动完成多条相贯线的切割(由于受界面限制,设备上一次最多可输入、连续切割8个相贯线图形),过程中无需人工干预
8.控制系统的基本配置及功能:
 8.1控制系统硬件
8.1控制系统硬件
工控一体机
USB 1个
CPU VIR 400
内存&, nbsp; DDR 512 MB
RS232 2个
硬盘 60G
运动控制卡 PMAC卡
电气控制柜 常州市海宝焊割有限公司
手持式操作箱 常州市海宝焊割有限公司
8.2控制系统软件:
操作系统 Windows XP视窗系统
相贯线数学软件 常州市海宝焊割有限公司
人机接口软件 常州市海宝焊割有限公司
8.3控制系统功能:
8.3.1本控制系统具有人性化的交互界面,操作简单、直观的三维相贯线成像;动态切割仿真一目了然;断点记忆具有原轨迹返回再返切功能;故障自我诊断及操作失误智能判别、自动报警显示、自动诊断功能;丰富、可扩充的宏程序调用及编辑功能;中文显示、人机对话功能。具有在线和离线的编程方式,可通过U盘,网络等和外部交换信息,并可手动输入作临时性修改。多条相贯线连续切割,多管相交一次切割成形,提高准确性。
8.3.2快速自动定位、暂停、加减速控制。
8.3.3乙方提供软件的免费升级。
9.主要精度要求:
六轴数控管道切割机的切割精度能满足被切割钢管符合国家标准,能达到工件长度尺寸定位精度为0.2mm/2000mm;母线定位精度为≤±0.5mm; 各类相贯线相配管接头装配间隙误差≤±0.5 mm。
9.1工件旋转驱动
驱动系统 精密齿轮箱、齿轮副传动
转速 0.1-25r/min
复位精度 ±0.3mm
9.2割炬小车沿工件轴向移动
驱动系统 国产精密齿轮箱,
齿轮、齿条传动
割炬小车有效行程 与L1相同
复位精度 ±0.2mm
9.3割炬工件轴向平面摆动轴
驱动系统 平面4连杆机构
摆动角度 45°-135°
定位精度 ±0.3°
9.4割炬小车上下移动轴
驱动系统 国产精密齿轮箱,直线导轨、
滚珠丝杆付传动
割炬小车上下行程 由切割机形式确定(符合切割管径要求)
高度跟踪系统 精密位移传感器
复位精度 ±0.2mm
9.5割炬工件径向平面摆动轴
驱动系统 平面4连杆机构
摆动角度 45°-135°
定位精度 ±0.3°
10. 安全装置:
10.1各运动部件在适当处均设安全防碰撞保护装置及限位开关。
10.2在软件中设置极限自锁保护。
10.3在控制箱设有紧急停车开关。
10.4在燃气和氧气管路上均安装回火防止器。
