

MIT开发设计出带触觉软性机械手,能灵便操作电缆线等可形变物体
MIT开发设计出带触觉软性机械手,能灵便操作电缆线等可形变物体
7月14日,麻省理工大学在智能机器人行业国际性顶尖大会RSS2020上展现了一对配用高像素触觉感应器的机械手,他们可以灵便操作电缆、电缆线等可形变物体。科学研究精英团队称,它是智能机器人初次在沒有别的机械设备协助的状况下即时操作电缆。
毕业论文第一作者麻省理工大学博士研究生佘宇在接纳澎湃新闻网记者采访时详细介绍,该机械手能够运用于一切涉及到绳子操作的情景,例如加工厂里的尼龙绳、电缆全自动生产加工和安装。
“潜在性的运用包含一切带有可形变物体的操作,例如铺被单,穿着打扮,折衣服。”
他表露,下一步科学研究精英团队会开展更繁杂绳子的自动化技术操作,也会进行对更繁杂的可形变物体的自动化技术操作,例如衣服裤子和被单。
此项科学研究由麻省理工大学的电子信息科学和人工智能技术试验室(CSAIL)与机械设备工程学院协作进行。
双“手”相互配合插手机耳机线
针对智能机器人而言,即时操作例如电缆、铁丝这类的可形变软性物体是艰难的。由于这种软性物体的样子会伴随着拖动而产生变化规律。而智能机器人的“手指头”务必持续磁感应并调节物体的部位和健身运动。
一般,智能机器人操作电缆必须在有机械设备管束的标准下开展,即根据把绳索置放在桌子等方法,产生准静态数据构造,减少电缆的可玩性后,智能机器人再开展操作。
而佘宇所属精英团队的总体目标是在沒有机械设备管束的标准下即时操作电缆。
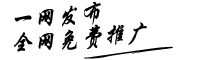
她们在公开视频中演试了这对机械手插手机耳机线的全过程:“右手”轻轻地捏住手机耳机线的尾端,“左手”捏住手机耳机线一侧并开展拖动,在认知到插口时终止并调节姿态,让手机耳机线电源插头指向孔距。这时“右手”手指头相互配合松掉手机耳机线,“左手”随着将耳机插头插进插口。视頻显示信息,应对操作全过程中人为因素导致的外力作用影响,机械手作出了立即调节。

机械手将耳机插头插进插口
佘宇详细介绍,科学研究精英团队融合了机械结构设计、触觉传感技术和控制系统设计三个行业来开发设计这款机械手。而较大的闪光点取决于,在其中每一个实际研究内容都并不是非常繁杂,“可是她们融合在一起可以处理比较复杂的难题”。
掩藏在“手指尖”的触觉感应器
在佘宇来看,怎样有机化学地结合机械结构设计、触觉传感技术和控制系统设计这三个相对性单独的行业系统软件也是全部设计过程中最艰难的。因而,精英团队在设计方案的每一步全过程上都持续融合、考虑到三个行业。例如,在最开始开展机械结构设计的时,她们便会考虑到事后的传感技术和操纵设计方案难题。
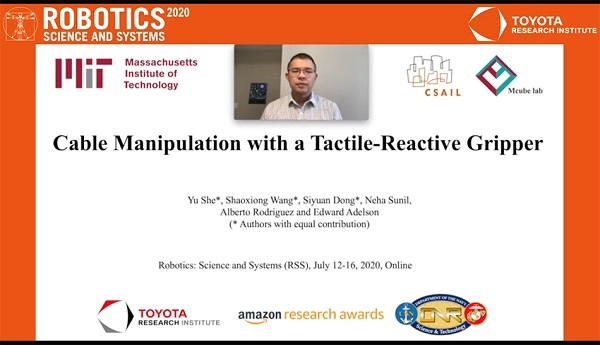
在机械结构设计层面,这款机械手关键由一对工装夹具状的两指抓爪和机械手臂构成。二只具备力和部位操纵作用的抓爪部位相对性,并可以快速挪动。这对抓爪被安裝在机械手臂上,机械手臂也可以挪动。
机械手系统软件
完成机械手实时跟踪并操作电缆必须考虑多种多样标准。最先,机械手需操纵抓物力以完成电缆在抓爪中稳定拖动;次之,机械手必须操纵其“抓物姿态”以避免电缆从抓爪的“指尖”坠落。科学研究精英团队根据触觉传感技术和控制系统设计来处理这种难题。
佘宇详细介绍,传统式触觉感应器的意见反馈信息内容十分比较有限,难以获得触碰物体的姿势信息内容。因而,科学研究精英团队在抓爪的“手指尖”安裝了内嵌监控摄像头的“Gelsight”触觉感应器。这类内嵌监控摄像头的触觉感应器在工作中全过程中出示了“十分高维空间”的意见反馈数据信号,包含触碰物体的部位和姿势信息内容。
他表明,尽管近期也是有一些机械手应用了根据照相机的触觉感应器,“可是她们的操纵网络带宽极低,没法做到同步控制”,而MIT这款机械手是专业订制的,可以合理保证即时意见反馈。
依据感应器的信息内容,科学研究精英团队设计方案了另外运行的2个控制板,使机械手可以机敏操作可形变的物体。一个为电缆工装夹具控制板,用以调整抓力,使电缆可以在抓爪中稳定拖动。另一控制板为电缆姿态控制板,该控制板可以维持电缆处于抓爪“手指头”的中间。

根据触觉传感技术与控制系统设计,当抓爪被安裝在机械手臂处时,可以从最开始任意抓物的部位刚开始,像人们一样用“两手”挪动电缆,寻找电缆的尾端。该认知和自动控制系统还可以运用于操纵别的不一样原材料、不一样弯曲刚度和直徑的电缆,也适用不一样的电缆追踪与操作速率。
将来想试着电缆走线
佘宇详细介绍,这款机械手能够运用于一切带有绳子操作的情景,例如加工厂里的尼龙绳或电缆的全自动生产加工和安装。潜在性的运用包含带有一切可形变物体的操作,例如铺被单、穿着打扮、折衣服等。他表明,操作可形变物体如电缆、面料等在大家的生活起居中十分广泛,精英团队期待智能机器人能协助人们进行这类工作中,尤其是在工作职责反复枯燥或不安全的状况下。
现阶段,这款机械手都还没资金投入具体应用,佘宇说,如果有适合的机遇,精英团队期待可以和公司合作推广这款机械手。
科学研究精英团队强调,这款机械手也有改善室内空间。她们期待可以进一步改进感应器的样子以提升总体特性。触觉数据信号的頻率也尚需进一步提高。
除此之外,现阶段机械手的规格都还没做到理想化情况,佘宇和他的精英团队方案进一步变小机械手的规格来实行更为灵便的每日任务。
将来,科学研究精英团队方案对更繁杂的绳子自动化技术操作开展科学研究,比如电缆走线和根据阻碍物插进电缆等,也会探寻更繁杂的可形变物体的自动化技术操作。










